
PRACTICAL EVALUATION
In order to practically evaluate the performance and operating modes of
the proposed electric springs, 3 different experiments have been set up at the
Maurice Hancock Smart Energy Laboratory at Imperial College. a) The first test
is to power the electric spring with its series-connected electric load using a
standard ac power source so that the performance of each operating mode can be
examined.
The electric spring voltage and current are measured under
the three operating modes. b) The second test is to program the electric spring
with power reduction function and test it in the setup of Fig. 4. An unstable
power source is created in the form of a wind power simulator, which is formed
by generating electric power by a power inverter following a pre-recorded wind
speed profile and a base power profile of the ac generator. The purpose is to
check the voltage support capability of the electric springs and also the
relationship of the intermittent renewable power (from the wind power
simulator) and the load consumptions in the noncritical and critical loads. c)
The last test is to check the performance of the electric spring in a power system
setting as shown in Fig. 7. In this case, both voltage boosting and voltage
suppression operations are evaluated
4.1 Operation
of an Electric Spring as a Novel Smart-Grid Device

Fig.
4.1.1 . The experimental setup for the electric spring (with control block
diagram).
electric spring current is either leading
or lagging the electric spring voltage by 90 . The test conditions are Vs
=220 V (50 Hz), R1=51.4Ω.

Fig.
4.1.2. Measured steady-state electric spring waveforms under “neutral” mode
When the electric spring (ES) is operated near the neutral position,
the measured waveforms of the mains voltage(vs) , noncritical load
voltage(vo) , the ES voltage(va) , and the ES current
(same as the noncritical load current) are recorded and shown in Fig.4.1.2. In
this case,vo is essentially equal to vo as the va
is only 4 V rms for a 220 V mains.

Fig.
4.1.3 . Measured steady-state electric spring waveforms under “capacitive” mode.

Fig.
4.1.4 . Measured steady-state electric spring waveforms under “inductive” mode.
Fig.4.1.3 shows the corresponding waveforms when the ES is
operated in the capacitive mode. It can be observed that the ES current leads
ES voltage. Here negative reactive power is provided by the ES and is smaller
than vs . Then the ES is
operated in the inductive mode and the corresponding waveforms are shown in
Fig. 4.1.4. It can be seen that the ES current can be controlled to lag the ES
voltage. Under the inductive mode, the ES injects positive reactive power into
the system to provide voltage support.
4.2
Operation of an Electric Spring in an
Unstable Power Grid fed by Intermittent Renewable Power (a Demonstration of
Load Demand Following Power Generation and Voltage Support)

Fig.
4.2.1. A photograph of the experimental setup with a three-phase electric load
(consisting of a combination of resistors and lighting loads) and three
electric springs (one for each phase).
Fig. 4.2.1 shows the second practical setup for a three phase system.
The per-phase schematic is illustrated in Fig. 4.2.2. The electric spring is
programmed with the voltage support function. The intermittent renewable power
source is created by the power inverter which generates power according to a
pre-recorded intermittent wind profile and the base power profile of 1.2 kW. A pre-recorded wind profile of 30
minutes (1800 s) with the based power is fed to a power inverter to generate a
weakly regulated ac mains voltage pattern in the bus bar. Both the smart load
and the critical load are connected across the power lines. After a 5-min
interval of programmed voltage at 220 V as a separation (from 1800 s to 2100
s), the same 30-min wind-driven voltage pattern was repeated from 2400 s. The
electric spring of the smart load is deactivated in the first voltage pattern
by closing the bypass switch S and then activated in the second pattern with S open.
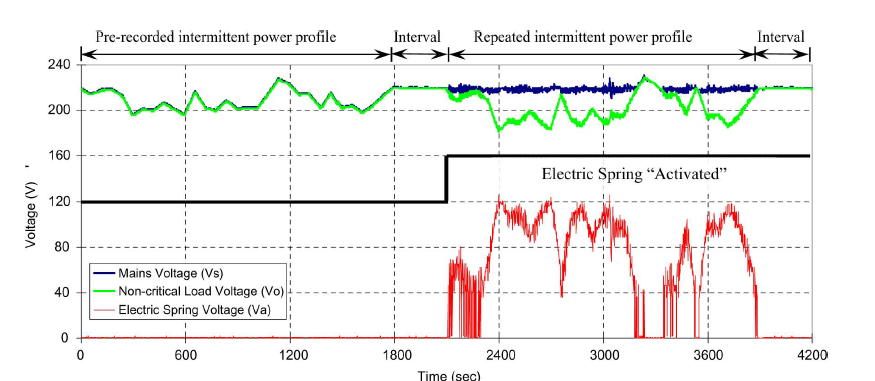
Fig.
4.2.3 . Measured root-mean-square values of the mains voltage vs ,
noncritical load voltage vo and electric spring voltage va
before and after the electric spring is activated
.
According
to (7), the vector of vs
is equal to the vectorial sum of vo
and va . Fig 4.2.3 shows
the measurements of the (scalar) rms values of the mains voltage , the
noncritical load voltage and the voltage of the electric spring before and
after the electric spring is activated. Before the electric spring takes action
in the first half of the test, the mains voltage fluctuates in the region below
the rated value of 220 V in this study. Because the bypass switch is closed
when the electric spring is deactivated, the noncritical load voltage overlaps
with the unstable mains voltage in the first voltage pattern generated by the wind
power simulator. However, it can be seen that, when the electric spring is
activated in the repeated voltage pattern in the second half of the test, the
mains voltage can be successfully boosted or supported to 220 V.
The bouncing action of the electric spring voltage can be seen
from Fig. 4.2.3 . The electric spring acts like a “voltage suspension spring”
to maintain a constant mains voltage. It is noted that when the noncritical
load voltage reaches 220 V (i.e., no voltage support is needed), the electric
spring voltage drops to zero. The noncritical load voltage is reduced when the electric
spring generates positive voltage to support the mains voltage. The
consequential variation of provides an automatic mechanism to shape the load
demand to follow the dynamic changes of the wind power profile. This effect can
be observed from the practical power measurements of the smart load unit in
Fig. 4.2.4.


Fig.
4.2.4. Measured power of the critical load and noncritical loads [Electric
spring is programmed for voltage boosting function only.]
After the electric spring is activated, the noncritical load
demand P1 varies with the wind power profile while the demand of
other loads P2 remains essentially the same. This result
demonstrates the effectiveness of the electric spring in both voltage support
and shaping the load demand to follow the wind power. These measurements
confirm the scientific theory and the effectiveness of the electric spring in
supporting the mains voltage of an unstable power system and in balancing the
wind power and the load power dynamically.
4.3 Test
of Electric Spring in a Power System With Intermittent Renewable Power
Injection (a Demonstration of Dynamic Voltage Regulation via Reactive Power
Compensation and Automatic Noncritical Load Shedding)
A smart
load unit comprising a combination of resistors (representing water heaters)
has been setup. Two power sources separated by a transmission network box are
used in this test. The experimental setup is shown in Fig.4.3.1. An AC voltage
source (provided by a 90 kVA sinusoidal PWM power inverter) and an intermittent
renewable voltage source (provided by a 10 kVA power inverter) are used
together to simulate the situation when intermittent renewable power becomes a
substantial portion of the total power generation. In order to simulate the
wind power generation, a recorded wind profile is used for the power inverter to
generate the
wind
power.


Since the electric spring is tested in the
distribution network, the choice of the line impedance to resistance (X/R)
ratio should reflect the value used for distribution cables. For distribution lines,
the typical ratio of reactance and resistance (X/R) is typically in the range
from 2 to 8. It should be noted that the cables under consideration are those
used in the overhead cables linking houses from one to the other in streets
(e.g in the distribution network of the residential area in Australia). For a
modest 150 A (240 V) overhead distribution copper cable, a typical phase size
of 500 should be chosen. Copper cable with a phase size of 500 has a line
impedance X=0.1202 Ω and resistance R=0.0247 Ω. The X/R ratio is about 4.87
(which is within the typical range of 2 to 8 for a distribution cable). In this
test, the two transmission network boxes have X/R ratios of 7.5 and 3.8
respectively. These ratios are within the typical range for distribution
cables.
A pre-recorded wind profile of 12 min (720
s) is fed to a power inverter to generate a weakly regulated ac mains voltage
pattern in the bus bar. Both the smart load and the critical load are connected
across the power lines. The same 12-min wind-driven voltage pattern was
repeated from 720 s to 1440 s. The electric spring of the smart load is
deactivated in the first voltage pattern by closing the bypass switch and then
activated in the second pattern with open.

Fig
4.3.2. Measured power of the critical load and smart load. [Electric spring is
programmed for both voltage boosting and suppression functions.]
This effect can be observed from the practical power
measurements of the smart load unit in Fig 4.3.2. After the electric spring is
activated, the load demand of the noncritical load is shed and the reactive
power is generated to follow the unstable mains voltage whilst the demand of
critical loads remains essentially the same. This result demonstrates the
effectiveness of the electric spring in both voltage regulation and shaping the
load demand to follow the wind power. These measurements confirm the scientific
theory and the effectiveness of the electric spring in regulating the mains
voltage of an unstable power system and in balancing the wind power and the
load power dynamically.
CONCLUSION
The Hooke’s law on mechanical springs has been developed into an
electric spring concept with new scientific applications for modern society.
The scientific principles, operating modes and limits of the electric spring are
explained. An electric spring has been practically tested for both voltage
support and suppression, and for shaping load demand (of about 2.5 kW) to
follow the fluctuating wind power profile in a 10 kVA power system fed by an AC
power source and a wind power simulator. The electric springs can be
incorporated into many existing noncritical electric loads such as water heaters
and road lighting systems to form a new generation of smart loads that are
adaptive to the power grid. If many noncritical loads are equipped with such
electric springs and distributed over the power grid, these electric springs
(similar to the spring array in Fig. 1) will provide a highly reliable and
effective solution for distributed energy storage, voltage regulation and
damping functions for future power systems. Such stability measures are also
independent of information and communication technology (ICT).
This discovery based on the three-century-old Hooke’s law offers
a practical solution to the new control paradigm that the load demand should
follow the power generation in future power grid with substantial renewable
energy sources. Unlike traditional reactive power compensation methods,
electric springs offer both reactive power compensation and real power variation
in the noncritical loads. With many countries determined to de-carbonize
electric power generation for reducing global warming by increasing renewable
energy up to 20% of the total electrical power output by 2020, electric spring
is a novel concept that enables human society to use renewable energy as nature
provides. The Hooke’s law developed in the 17th century has laid down the
foundation for stability control of renewable power systems in the 21st century.
REFERENCES
[1]
Hooke’s law—Britannica Encyclopedia [Online]. Available: http:// www.britannica.com/EBchecked/topic/271336/Hookes-law
[2]
A. M. Wahl, Mechanical Springs, 2nd ed. New York: McGraw-Hill, 1963.
[3]
W. S. Slaughter, The Linearized Theory of Elasticity. Boston, MA: Birkhauser,
2002.
[4]
K. Symon, Mechanics. ISBN 0-201-07392-7. Reading, MA: Addison- Wesley,
Reading
[5]
R. Hooke, De Potentia Restitutiva, or of Spring Explaining the Power of Springing
Bodies. London, U.K.: John Martyn, vol. 1678, p. 23.
[6]
D. Johnson et al., Basic Electric Circuit Analysis. Englewood Cliffs,
NJ: Prentice-Hall
[7]
Y. Prawotoa et al., “Design and failure modes of automotive suspension springs,”
Eng. Failure Anal., vol. 15, pp. 1155–1174, 2008.
[8]
W. Casson and H. J. Sheppard, “Technical and economic aspects of the supply of
reactive power in england and wales,” Proc. IEE—Part A, Power Eng.,
vol. 108, no. 42, pp. 507–526 W, 1961.
[9]
J. Dixon, L. Moran, J. Rodriguez, and R. Domke, “Reactive power compensation
technologies: State-of-the-Art review,” Proc. IEEE, vol. 93, no. 12, pp.
2144–2164, 2005.
[10]
H. K. Tyll and F. Schettle, “Historical overview on dynamic reactive power
compensation solutions from the begin of AC power transmission towards present
applications,” in Proc. IEEE Power Syst. Conf. Expo. (PSCE ’09),
pp. 1–7.
[11]
P. Sauer, “Reactive power and voltage control issues in electric power systems,”
in Applied Mathematics for Restructured Electric Power Systems. New
York: Springer, 2005